







.jpg)
4. krok - simulace a optimalizace
Optimalizace programů
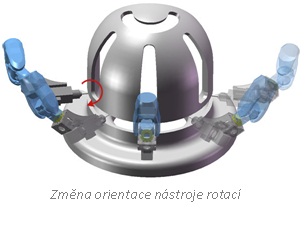
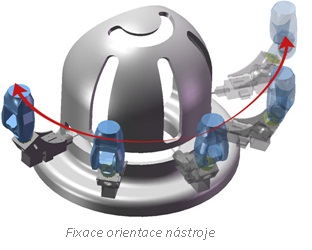
Použití automatických nastavení pro rychlou optimalizaci pohybů robota a přesné řízení rotačních pohybů robota:
- možnost nastavení omezení pohybů kloubů a singularity.
- maximalizace obratnosti robota.
- optimalizace rychlosti otáčení kloubů pro zajištění plynulých pohybů robota.
 |
 |
|
|
 |
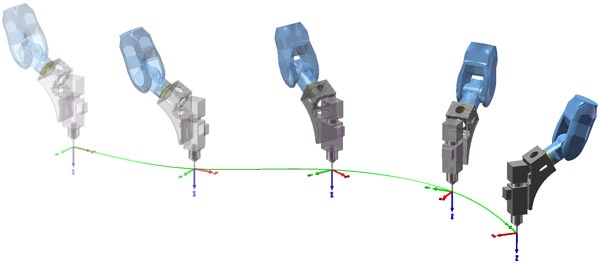
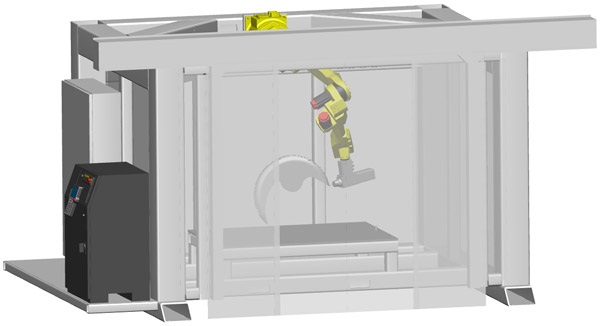
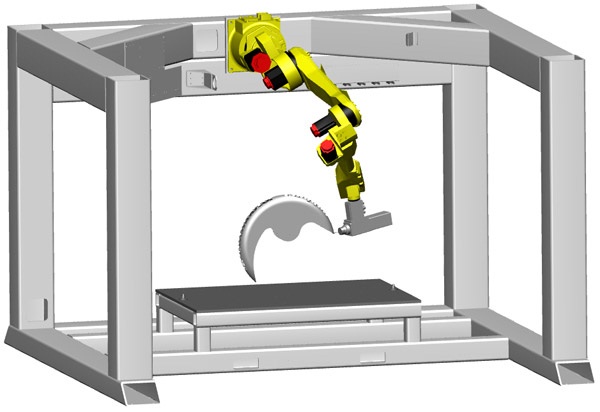
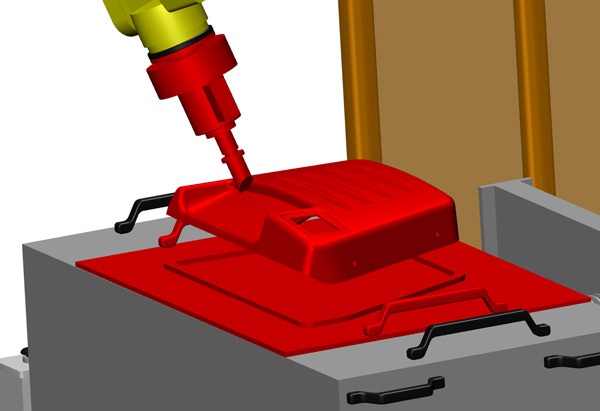
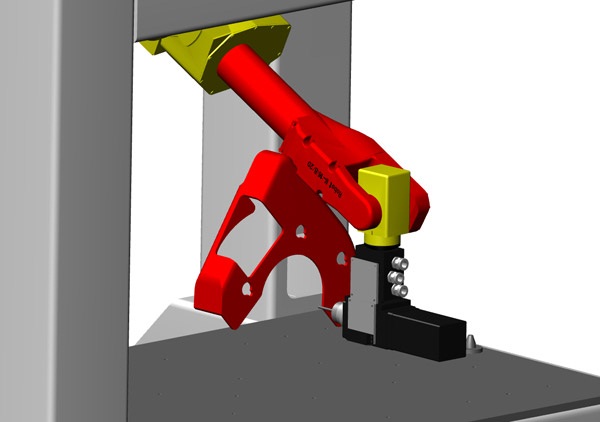
Simulace robota
Potvrzení programů použitím robot simulátoru Robotmaster
- Náhled pohybů robota v plynulém nebo krokovém módu po jednotlivých operacích nebo kompletní obráběcí postup
- Automatická detekce kolizí
-
Zobrazení pouze robota, nebo celého pracovního prostoru včetně ochranného krytu.
 |
 |
 |
 |