.jpg)
3. krok - parametry robota
Knihovna konfigurací robota
Pro snadnější výběr robota a nástroje pro zápěstí robota a převedení drah nástroje CAD/CAM dle vašich specifických hardwarových požadavků a nastavení, lze použít rozsáhlé knihovny nastavení robota:
- můžete vybírat ze značek KUKA, STAUBLI, FANUC, ABB, YASKAWA, a dalších
-
můžete vkládat řídící parametry robota jako:
- nastavení ochranných krytů či další grafiky
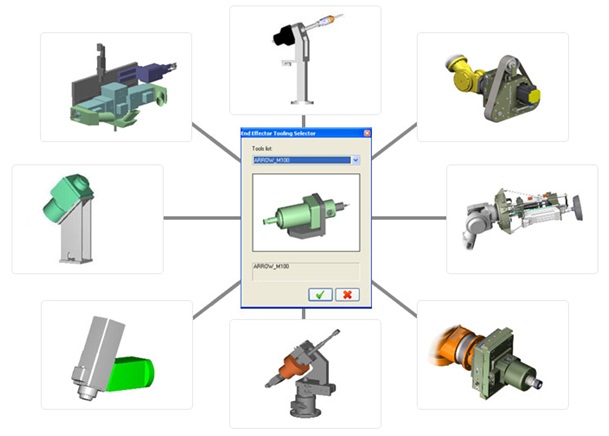
- volba nástroje na konci ramene robota
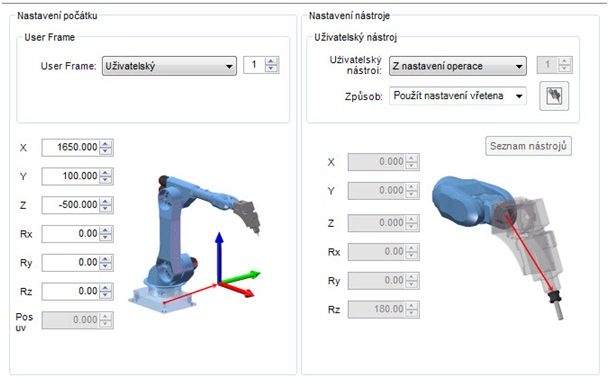
- pozice robota (nastavení vzdálenosti robota od obráběného dílce a určení centrálního bodu - CPD)
- informace o změnách nástroje a výměníku nástrojů
- parametry rozsahu pohybů
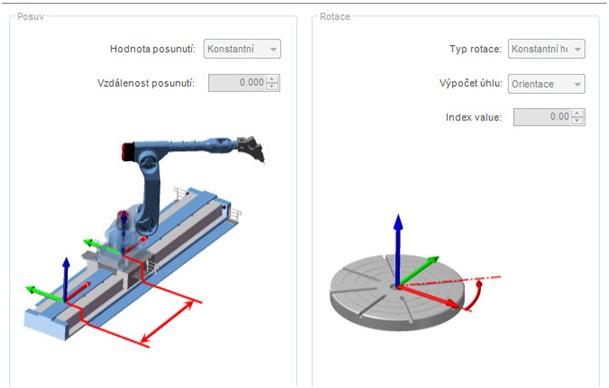
- konfigurace pro lineární (kolejnice) a/nebo rotační (stůl) pohyb
|
výběr nástroje robota |
zadání parametrů dalších os |
|
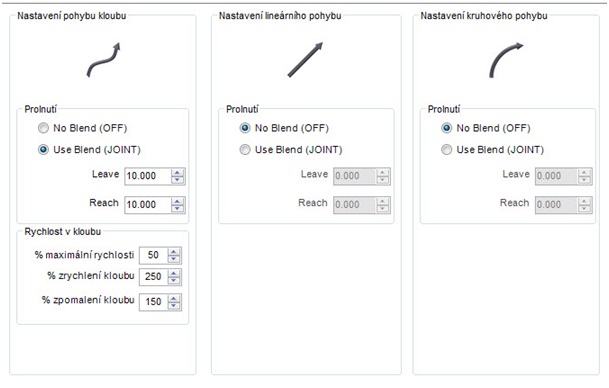
specifikace parametrů pohybu |
nastavení TCP a vzdálenosti nástroje |
Převod CAD/CAM dat do výstupu 6-ti osého robota
Použití grafického rozhraní k doladění parametrů, podle kterých bude Robotmaster překládat 2 až 5-ti osé CNC dráhy nástroje do 6- osé dráhy nástroje robota.
- volba konfigurace robota pro nastavení jeho optimální pozice
- řízení pohybů mezi jednotlivými operacemi